

Bir yapının modal karakteristiğini ortaya koyabilmek için yapılan deneysel çalışmalara modal test adı verilir. Herhangi bir dış kuvvete maruz kalan yapı titreşim eğilimine girer. Modal Test ve Modal Analiz ile bir yapının, maruz kaldığı kuvvet sonucunda sergileyeceği dinamik davranışlar karakterize edilir. Deneysel bir modal testte, yapıya bilinen bir girdi uygulanır ve yapının bu girdiye verdiği cevap ölçülür. Alınan yanıtın girdiye olan oranı frekans yanıt fonksiyonu (FRF) olarak adlandırılır. FRF, matematiksel yöntemler kullanılarak yapının modal özelliklerini (doğal frekans, sönüm oranı ve mod şekilleri) belirlemek için kullanılır. Bu yazımızda, Modal Test süreci ile ilgili kilit noktalar anlatılmaktadır.
Deneysel bir modda, fiziksel bir yapı test edilir ve titreşim modları tanımlanır (Şekil 1). Modlar, doğal frekans, sönümleme ve mod şekli ile tanımlanır.
Şekil 1: Sol taraf – Modal test kurulumu, Sağ taraf – Modal testin çıktısı frekans, sönümleme ve mod şeklidir.
Yapıya bilinen bir girdi uygulanır ve yapının bu girdiye verdiği cevap ölçülür. Alınan yanıtın girdiye olan oranı frekans yanıt fonksiyonu (FRF) olarak adlandırılır. FRF, yapının modal özelliklerini belirlemek için kullanılır. Modal özellikler yapının kendisinden türetilir ve nihai olarak girdi ve çıktılardan bağımsızdır.
Modal Test sürecinin her adımında verilmesi gereken bazı kilit kararlar vardır (Şekil 2).
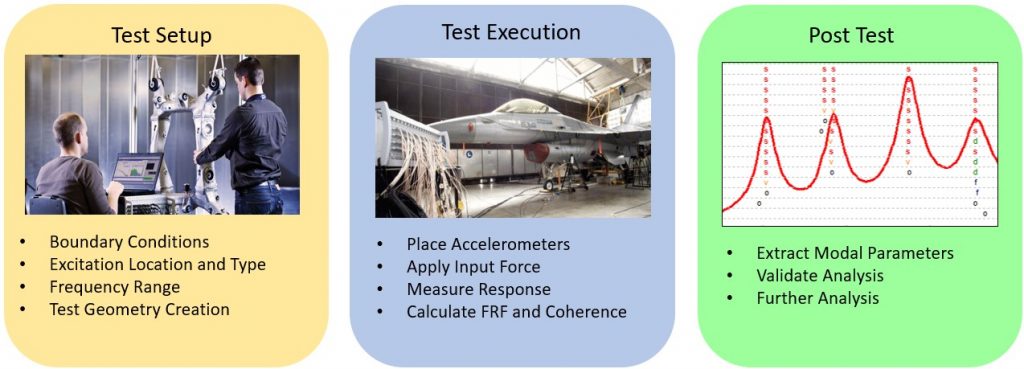
Şekil 2: Kurulumdan yürütmeye ve analize kadar deneysel bir mod testinin temel yönleri.
Bu makalede bu adımları ele alınmıştır:
1. Test Kurulumu
1.1 Sınır Şartları
1.2 Driving Point Araştırması
1.3 Kuvvet Metodu: Çekiş veya Sarsıcı
1.4 Kuvvet Seviyesi: Uygun Uç ve Frekans Aralığı
1.5 Kuvvet Seviyesi: Lineerlik
1.6 Geometri
2. Test Uygulaması
2.1 İvmeölçer seçimi
2.2 İvmeölçer montajı: Sağ El Kuralı
2.3 İvmeölçer montajı: Açı
2.4 Ölçüm Metodu: Çekiç gezdirme veya İvmeölçer gezdirme
2.5 Kalite kontrol: FRF ve Coherence
3. Test Sonrası
3.1 Modal Eğri Uydurma
3.2 Modal Doğrulama: MAC Modal Güvence Kriteri (Modal Assurance Criterion)
3.3 Modal Doğrulama: Modal Sentez (Modal Synthesis)
3.4 Diğer Test Sonrası Analiz Seçenekleri
1. Test Kurulumu
Modal testin hazırlığı ve kurulumu kritik bir öneme sahiptir. Verilerin, ilgili koşullarda elde edilmesi ve yüksek kalitede olması gerekir. Testin kurulumunda yapılan hatalar, analiz aşamasında ekstra zaman harcanmasına veya daha kötü bir senaryo olarak testin yeniden yapılmasına neden olabilir.
1.1 Sınır Şartları
Testin amacı nedir? Test nesnesinin ölçüldüğü koşullar, test amacı tarafından belirlenir. Şekil 3’te gösterilen bir “motor beşiği” düşünün. Bu, motoru araç üzerinde yerinde tutan metal bir yapıdır. Motora ve gövdeye bağlantı yerleri vardır.
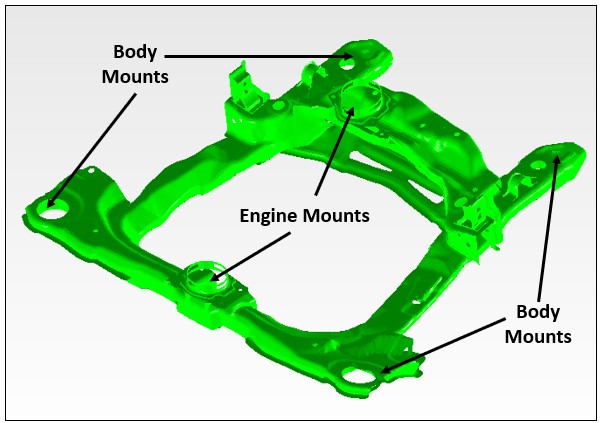
Şekil 3: Bir motor beşiği normalde hem gövde yapısına hem de montaj yerlerinden bir motora bağlanır.
Test tek başına motor beşiğinde mi yapılmalı? Yoksa test yapılırken motor beşiği, motora ve gövdeye mi takılmalı? Bu sorunun cevabı testin amacına göre değişmektedir.
- Kurulu Sınır Koşulları: Belki de tüm aracın dinamik davranışının anlaşılması gerekir. Bu durumda motor beşiğinin gövde yapısına ve motora takılması gerekecektir. Sadece motor beşiği değil, gövde yapısı ve motor da ölçülmelidir.
- Free-Free (Serbest) Sınır Koşulları: Analist, komple aracın dinamik davranışını anlamak için bir sonlu eleman simülasyon modeli oluşturabilir. Aracın tek seferde modelini oluşturmak yerine, model daha küçük bileşenlerle oluşturulabilir. Motor beşiği gibi bazı tekil bileşenler, free-free sınır koşullarında test edilebilir ve modellenebilir. Free-free bileşen testinin dinamik davranışının simülasyon bileşeniyle yeterince eşleştiğini doğruladıktan sonra modele sınır koşulları eklenebilir ve anlaşılabilir.
Yapının komponent bazında test edilmesiyle, yapı üzerindeki diğer elemanların test edilen komponent üzerinde dinamik etkileri görülmeyeceği için daha yüksek doğrulukta test gerçekleştirilmiş olur. Daha sonra bileşenler, uygun sınır konuşulları ile birleştirilebilir.
Free-free sınır koşulu, test nesnesini uzayda askıya alarak, test maddesi üzerindeki dış etkileri ortadan kaldırır. Bilgisayar tabanlı bir modelde, Şekil 5’te gösterildiği gibi, uzayda bir nesneyi askıya almak kolaydır. Fiziksel mod testi için bu, Şekil 4’te gösterildiği gibi yumuşak yaylar (elastik kordonlar veya hava yastıkları gibi) üzerinde askıya alarak yapılır.

Şekil 4: Free-Free sınır koşullarında gerçekleştirilen bir motor beşiği mod testi.
Bir nesne serbestçe asıldığında, test nesnesinin ilk altı modu tipik olarak “rijit gövde” modlarıdır. Bir simülasyon modelinde, bu altı modun tümü 0 Hz’de gerçekleşir. Üç ötelemeli rijit gövde modu ve üç döner rijit gövde modu vardır. Fiziksel bir modal testte, modlar asla 0 Hz’de mükemmel değildir. Meydana geldikleri sıklık, test nesnesinin ne kadar yumuşak bir şekilde askıya alındığına bağlıdır.
Şekil 5’te rijit gövde mod ve esnek mod gösterilmektedir.
Şekil 5: Sol – Bir motor beşiği için sıfır Hertz’de altı rijit gövde modundan biri. Sağ – Bir motor beşiğinin esnek bir titreşim modu.
Rijit ve esnek bir titreşim modu arasındaki fark nedir?:
- Rijit Gövde – Rijit gövde titreşim modunda, test edilen nesne modal deformasyona uğramaz. Üzerine monte edilen yumuşak yaylar üzerinde tek parça olarak titreşir (sol taraf, Şekil 5).
- Esnek Gövde – Esnek gövde titreşim modunda, test nesnesi deformasyona uğrar. Örneğin, burulabilir veya bükülebilir (Sağ taraf, Şekil 5).
Karmaşık bir yapının dinamiklerini doğrulamak için modal bir test gerçekleştirirken, projenin mevcut aşamasının amacına bağlı olarak genellikle hem free-free hem de temsili sınır koşullarına sahip testler yapılır.
Sınır koşulları, gerçek hayatta yaşananlara karşı, bir laboratuvar testinden farklı olabilir. Örneğin, arabadaki amortisörler belirli bir miktarda tutuşa sahiptir. Amortisör, rijit bir bağlantı gibi görünse de yolda bu şekilde davranmıyor. Bir laboratuvar testinde doğru sınır koşulunu elde etmek için amortisöre bir sarsıcı yardımıyla darbe uygulanabilir.
Bazen modal analizin, gerçek çalışma durumundaki temsili yükler altında test nesnesi üzerinde yapılması istenebilir. Motora yerleştirilen tek bir sarsıcıdan gelen yükler, tam gaz açıkken yaşanan yükleri temsil etmeyecektir. Bu durumda Operasyonel Modal Analiz kullanılabilir.
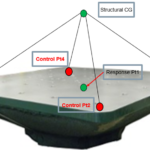
1.2 Driving Point Arama
Bir modal test yapılmadan önce kuvvet uyarımının nereye uygulanacağına karar verilmelidir. Seçilen nokta, test yapısının tüm modlarını kolayca harekete geçirmelidir.
Bu nokta bir “Driving Point Araması” ile belirlenebilir. Bir driving point aramasında, farklı parçaların rezonans frekanslarını belirlemek için bir darbe çekici ve ivmeölçer yapı üzerinde birlikte gezdirilir. Mevcut tüm rezonans frekanslarının tam bir grafiğini elde etmek için çeşitli ölçümler toplanır.
Bir driving point araştırmasının sonuçlarından bazıları Şekil 6’da gösterilmektedir.
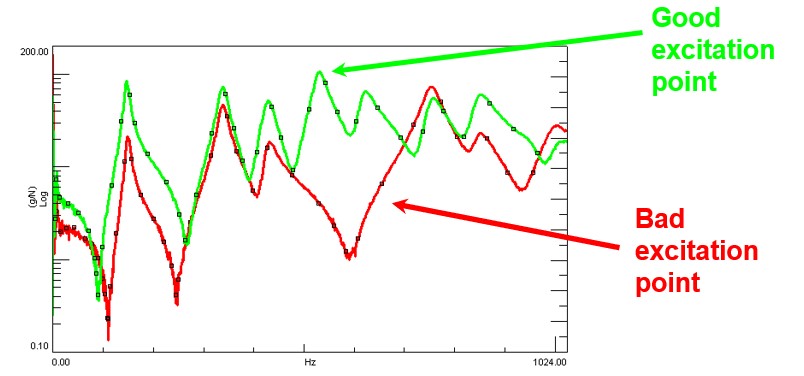
Şekil 6: Bir driving point araştırmasında, yapının tüm modlarını (yeşil) heyecanlandıran konum, mod testi için en iyi uyarı konumudur. Tüm frekansları (kırmızı) uyaramayan konumlardan kaçınılmalıdır.
Yapıdaki tüm doğal frekanslar belirlendikten sonra en iyi uyarma konumu belirlenir. Tüm frekansları gösteren bireysel driving point FRF ölçümü ile en fazla rezonans noktası nerede gözlemlenir ise uyarma konumu olarak o nokta belirlenir.
1.3 Kuvvet Metodu: Çekiç (Hammer) veya Sarsıcı (Shaker)
Genel olarak konuşursak, laboratuvar temelli bir modal test sırasında uygulanan kuvvet, bir sarsıcıdan veya bir darbe çekicinden gelebilir (Şekil 7).
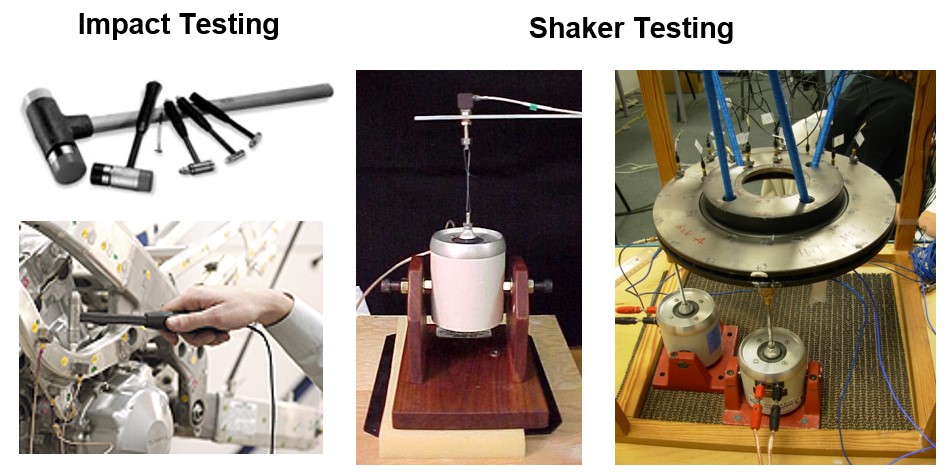
Şekil 7: Sol – Modal uyarma için darbeli çekiçler. Orta ve Sağ – Modal uyarma için elektrodinamik sarsıcılar.
Peki sarsıcı veya çekici hangi durumlarda kullanırız?
- Darbe Çekici – Darbe çekici kurulum gerektirmez, sadece yapının istenen yerine vurun. Uygulaması hızlı bir yöntemdir fakat giriş kuvveti kontrol edilemez.
- Sarsıcı – Sarsıcı, tahrik girişinin istendiği noktaya dikkatlice konumlandırılması gereken ve uygulaması esnasında çekiç yöntemine kıyasla daha fazla zaman harcanması gereken bir yöntemdir. Bu yöntemde uygulanan kuvvet kontrol edilebilir, ayrıca aynı anda birden fazla sarsıcı kullanımı ile yapı tahrik edilebilir.
Resimde gösterilen iki yapının tahrik edilmesini düşünün (Şekil 8).

Şekil 8: Sol – Daha küçük nesneler bir sarsıcı veya çekiçle kolayca uyarılabilir, Sağ – Büyük bir yapının tek bir darbe çekiciyle uyarılması tüm yapıyı tahrik etmeyebilir ve doğrusal olmayan bölgesel davranışa neden olabilir. Aynı anda birden fazla sarsıcı kullanmak daha iyi sonuçlar verebilir.
Küçük nesneler, sarsıcı veya çekiç ile kolaylıkla tahrik edilebilir. Figure 8’de paylaşılan resmin sağ tarafındaki gibi büyük yapılar çekiç ile tahrik edildiğilde, uygulanan tahrik kuvveti sonucunda yapının vereceği yanıtı ölçmek, küçük yapıların yanıtını ölçmekten daha zor olacaktır. Yapı o kadar büyük ki, titreşim, yapı boyunca hareket ederken sönümleniyor.
Yapının diğer tarafından daha fazla yanıt almak için, çekiçle daha sert vurarak daha yüksek bir kuvvet uygulamak cazip gelebilir. Bu alacağınız yanıtı yükseltebilir ancak darbe uyguladığınız noktada doğrusal olmayan davranışlar gözlemlenmesine neden olabilir. Her biri yapının farklı taraflarına konumlandırılmış birden fazla sarsıcıyı aynı anda kullanmak daha iyi sonuçlar verebilir.
Tipik bir darbe çekici ve sarsıcı modal testinin şemaları Şekil 9’da gösterilmektedir.
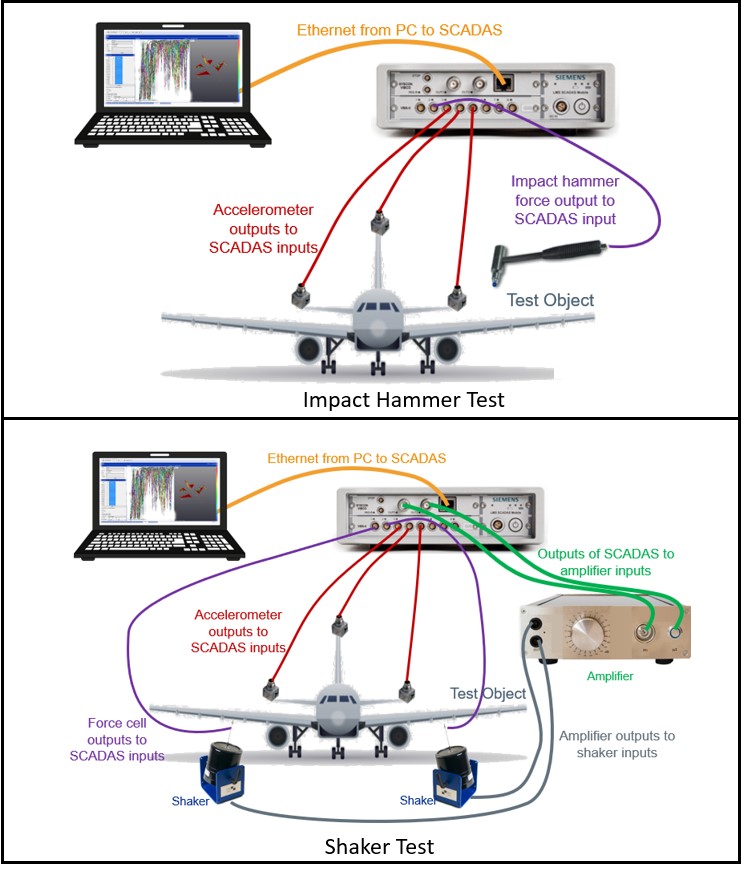
Şekil 9: Üst – Darbeli çekiç test kurulumu, Alt – Sarsıcı test kurulumu
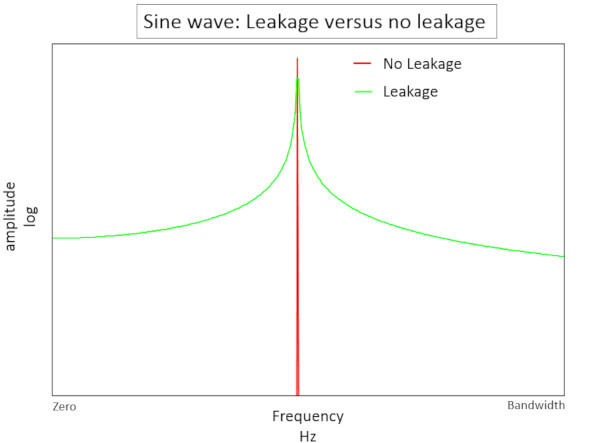
1.4 Güç Seviyesi: Uygun Uç Seçimi ve Frekans Aralığı
Modal test gerçekleştirirken, tahrik kuvveti, ilgilenilen frekans aralığını tahrik etmelidir.
Sarsıcılar için bu, Simcenter Testlab yazılımında, istenen frekans aralığının girilmesi anlamına gelir. Darbe ölçümleri için ise bu biraz daha zorlayıcı olabilir.
Darbe çekici ölçümünde, giriş ucu, Şekil 10’da gösterildiği gibi çok kısa bir süre yapı ile temas halindedir.
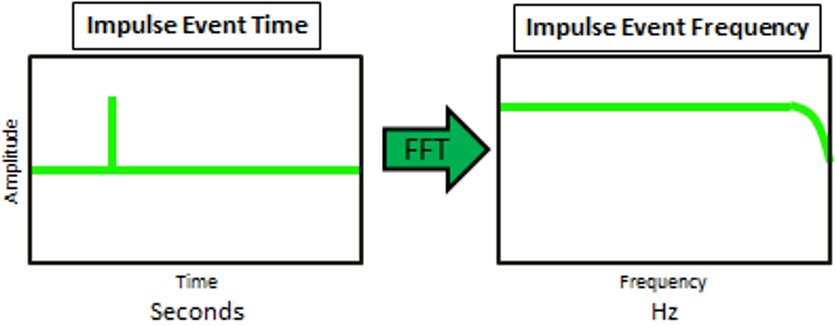
Şekil 10: Sol – Darbe çekici ve yapı arasındaki kısa süreli temas kuvveti, Sağ – Zamandaki kısa bir olayın Fourier Dönüşümü frekans olarak geniştir.
Aslında, yapı ile çekiç ucu arasındaki temas süresi ne kadar kısa olursa, yanıtın frekans aralığı o kadar geniş olur.
Metal gibi sert bir uç kullanmak, kauçuk gibi yumuşak bir uç kullanmaktan daha yüksek bir frekans aralığı sağlar (Şekil 11).

Şekil 11: Modal darbe çekiçleri genellikle farklı sertliklere sahip bir dizi uç ile temin edilir.
İdeal uç, vuruş enerjisini ilgilenilen frekans aralığını uyaracak ve daha fazlasını uyarmayacak şekilde seçilmelidir. İlgi aralığının dışındaki frekanslarda “atık” enerji değil, ilgili frekans aralığı boyunca yapıya mümkün olduğunca fazla girdi kuvvetinin olması arzu edilir.
Şekil 12’de iki farklı uç kullanımının sonuçları karşılaştırılmıştır.
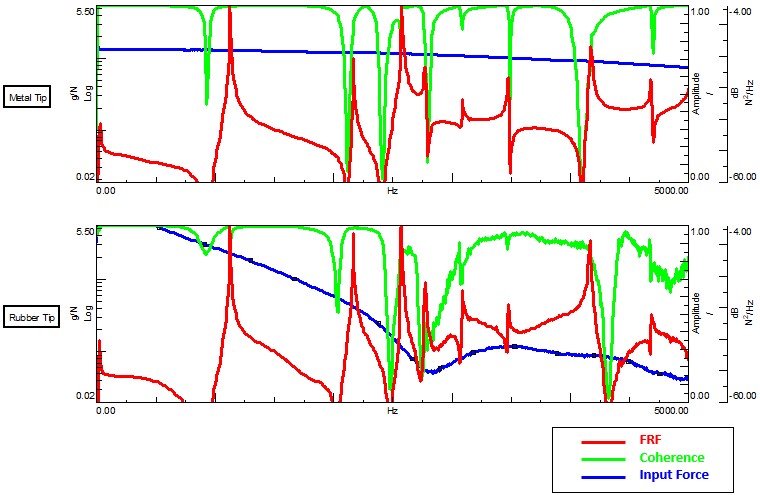
Şekil 12: Üst – Darbe çekici üzerindeki metal uç, daha yüksek frekans aralığını harekete geçirir. Giriş kuvveti spektrumu (mavi), ilgilenilen frekans aralığı üzerinde tutarlı bir seviyede kalır. Tutarlılık (yeşil) değerleri rezonansta bire yakındır ve FRF (kırmızı) temizdir. Alt – Aynı yapıdaki kauçuk uç, daha düşük frekans aralığını harekete geçirir. Giriş kuvveti spektrumu (mavi), ilgilenilen frekans aralığı üzerindeki yuvarlanmalardır. FRF (kırmızı) gürültülüdür ve rezonans frekanslarında bile tutarlılık (yeşil) bire yakın değildir.
Etki ölçümünün dikkatli bir şekilde kontrol edilmemesi durumunda, Şekil 12’de gösterildiği gibi, tutarlılığı zayıf olan gürültülü veriler ortaya çıkabilir.
Çekiç kafasının kütlesi de çekiç ile yapının ne kadar süre temas halinde kalacağını belirlemede bir faktördür. Çekiç kafasının kütlesi ne kadar yüksek olursa, temas o kadar uzun olur ve frekans içeriği o kadar düşük olur. Bununla birlikte, girdi kuvveti seviyeleri, kütleli olanda kütlesiz olana göre daha yüksektir. Darbeli çekiç kitlerinde, isteğe bağlı ayrıca kütle genişleticiler bulunur (Şekil 11).
1.5 Kuvvet Seviyesi: Doğrusallık
Modal bir testte ve sonrasında yapılan analizde yapısal tepkinin lineer olduğu varsayılır.
Doğrusal bir yanıt ne anlama geliyor? Ve doğrusal olmayan bir yanıt nedir? Modal test sırasında test nesnesine bir kuvvet uygulanır. Kuvvet yeterince yüksekse, nesne kırılır. Bu doğrusal olmayan bir yanıt olacaktır. Eğer test nesnesi kırılırsa modal bir model geliştirmenin ne kadar zor olacağını tahmin etmek zor olmayacaktır.
Test nesnesinin doğrusal olmayan yanıt sergilemesi için sadece kırılması gerekmez. Doğrusal bir yanıtta, kuvvet seviyesi iki katına çıkarsa, ivme yanıtı da iki katına çıkmalıdır. Bir Newton kuvvet uygulayın ve iki g ivme elde edin, giriş kuvveti iki Newton’a yani iki katına çıktığında doğrusal bir yapı dört g ivme ile yanıt verir.
Bu durum pratikte her zaman böyle olmayabilir. Giriş ve çıkış arasındaki ilişkinin doğrusal olmamasına neden olan kauçuk burçlar, gevşek parçalar, sıvılar vb. gibi doğrusal olmayan bileşenler olabilir.
Test sırasında uygulanan kuvvet değişebileceğinden (örneğin random bir test uygulanıyorsa), Şekil 13’te gösterildiği gibi bir doğrusallık kontrolü yapmak iyi bir seçenek olacaktır.
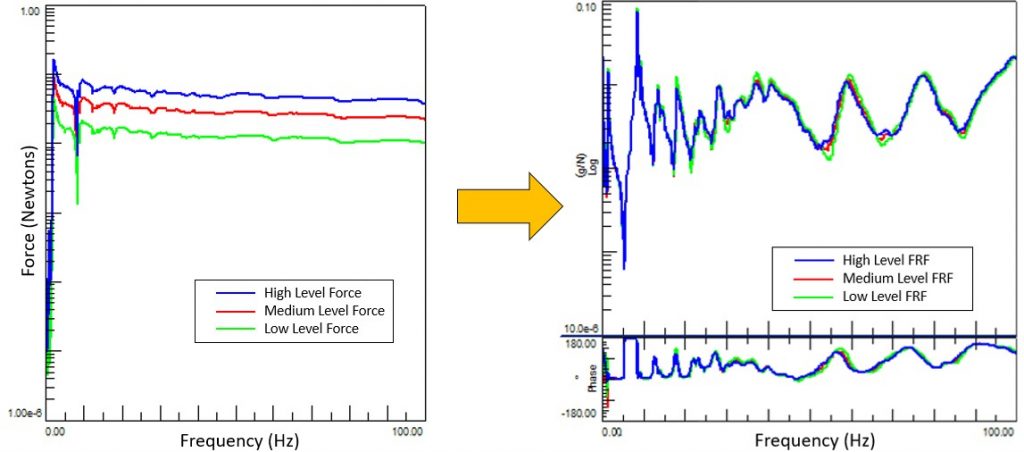
Şekil 13: Sol – Yapıya üç farklı kuvvet (mavi, kırmızı, yeşil) uygulanır, Sağ – Üç farklı kuvvet (mavi, kırmızı, yeşil) nedeniyle alınan yanıt FRF (Frekans Tepki Fonksiyonu) verileri.
Tipik bir doğrusallık kontrolünde, test için amaçlanan kuvvet seviyesi ikiye katlanır ve yarıya iner. Bir yanıt konumu ile kuvvet arasındaki FRF karşılaştırılır. Yapı doğrusal ise, üç FRF aynı olmalıdır. Belirli tepe noktalarının frekansı kayarsa veya genlikler farklıysa, yapıda bazı doğrusal olmayan durumlar söz konusudur.
Doğrusal olmama durumlarında ne yapılmalı? Bazı fikirler:
- Sarsıcıyı sürekli olarak daha yüksek genlikte çalıştırın. Sarsıcı çalışırken, gevşek ve ses çıkaran parçaları arayın. Onları ortadan kaldırın.
- Sıçrayabilecek sıvı içeren parçalara dikkat edin. Mümkünse sıvıyı ortadan kaldırın.
- Kırılabilecek veya birbirine temas edebilecek parçaları bulun.
- Testi, doğrusallık kontrolünden geçebilecek daha düşük bir kuvvet seviyesinde çalıştırın.
- Sabit genliğe sahip farklı bir kuvvet türü düşünün. Örneğin, sinüzoidal tipte bir giriş.
1.6 Geometri
Teste başlamadan önce, modal test sırasında test edilecek tüm noktaların geometrik bir düzenini oluşturmak iyi bir seçenek olacaktır. Geometri, Şekil 14’te gösterildiği gibi bir dizi nokta ile tanımlanır. Uzayda bir konum koordinatı ile her bir nokta tanımlanır. Gerçek test nesnesi üzerinde ivmeölçerler bu tanımlanan konumlara yerleştirilir.
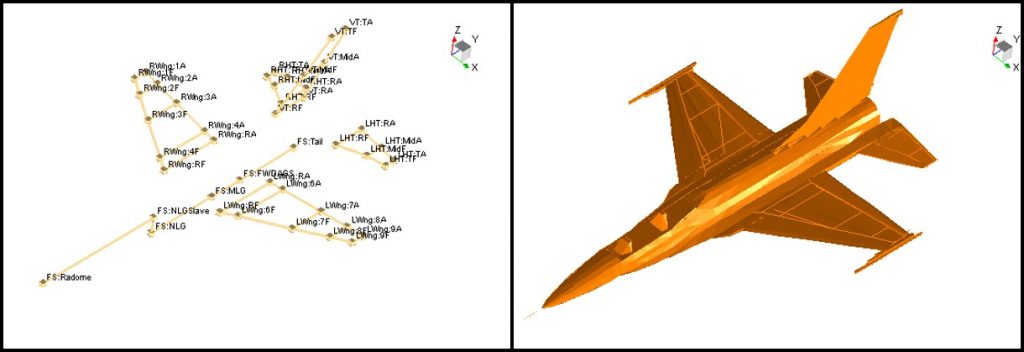
Şekil 14: İvmeölçerlerin uçak test nesnesi (sağda) üzerinde konumlanacağı bir dizi noktalar veya düğümler (solda).
Peki kaç nokta yeterli?
- Herkes tarafından anlaşılabilirlik: Test ile ilgilenen kişilerin, test edilen noktalara bakarak, test numunesi hakkında fikir sahibi olabilmesi gereklidir. Bunun için yeterli sayıda nokta belirlenmelidir.
- Zemin: Eğer test edilen parça bir zemine montajlı ise, ivmeölçer yardımıyla paraçanın montajlı olduğu zeminin hareket etmediği doğrulanmalıdır. Bu sayede yakalanan modlara zemin titreşiminin etksinin olmadığı, tamamen üzerinde çalışılan parçaya ait modlar olduğu anlaşılır.
- Bileşen: Daha büyük bir yapıya kurulmuş bir bileşeni mi test ediyorsunuz? Sadece bileşen üzerinde değil, büyük yapı üzerinde ölçüm yaptığınızdan emin olun! Daha büyük yapının modları bileşeni etkileyecektir. Ölçümler yalnızca bileşen üzerinde yapılırsa, bileşenin bir modu gibi görünen şey, gerçekte yapının daha büyük bir modunun parçası olabilir.
- Frekans Aralığı: Frekans aralığı ne kadar yüksekse ve ölçülen modlar ne kadar fazlaysa, mod şekilleri o kadar karmaşık ve yerel hale gelir. Bu durumda mod şekillerini tam olarak yakalamak için daha fazla noktaya ihtiyaç vardır. Yeterli nokta ölçülmezse, daha yüksek frekans modu şekilleri, daha düşük frekans modu şekillerine benzer görünebilir. Buna uzamsal örtüşme denir.
Bu makalenin ileriki adımlarında tartışılacak olan Modal Güvence Kriteri (MAC) gibi bazı deneysel araçlar da yeterli noktanın elde edilmesini sağlamaya yardımcı olabilir. Simcenter 3D Pretest gibi yazılımlar, ölçüm konumlarını optimize etmek için MAC’i testten önce bir simülasyon modelinde kullanabilir.
2. Test Uygulaması
İdeal olarak, tüm çıkış yanıt konumları, modal bir testte aynı anda ölçülebilir.
Bununla birlikte, mevcut fiziksel ivmeölçerlerden daha fazla ölçüm konumu istenebilir. Bu durumda, ivmeölçerler tipik olarak birden fazla ölçüm noktası üzerinde gezdirilir. İvmeölçer gezdirme yönteminde tek bir noktadan kuvvet uygulanır ve bu kuvvet referans olarak seçilir. Bu şekilde Frekans Tepki Fonksiyonları (FRF) ölçümleri tamamlanır. İvmeölçerlerin konumları, doğrultuları ve açıları işlem boyunca düzgünce kaydedilmelidir.
2.1 İvmeölçerleri Yönetme
Sınırlı sayıda ivmeölçerle birden fazla konumun ölçülmesinin gerektiği modal bir test gerçekleştirirken, bu durumu göz önüne alarak test planı yapmak faydalı olacaktır. Örneğin, ölçülecek on iki ivmeölçer konumu olduğunu, ancak yalnızca iki ivmeölçerin mevcut olduğunu varsayalım.
Bu iki ivmeölçer, Şekil 15’te görüldüğü gibi ölçüm konumları üzerinde gezdirilebilir. Noktalar, test nesnesinin her iki tarafında artan bir düzende konumlandırılır. Örnekleme amacıyla sarı bir simetri düzlemi gösterilmiştir.
Şekil 15: İvmeölçer ölçüm konumları, simetrik bir test nesnesinin iki tarafında artan sırada konumlandırılır.
Bu düzenin avantajı, noktaların, Şekil 16’da gösterildiği gibi bir sonraki nokta tanımlamasına kolayca geçebilmek için program üzerinden increment özelliğinin kullanılabilecek olmasıdır.
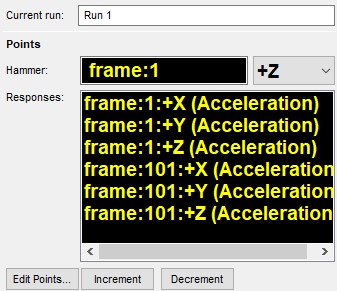
Şekil 16: Simcenter Testlab’daki “Increment” düğmesi (altta), tanımlanan noktalar arasında kolayca geçiş yapılmasını sağlar. Increment (artış), ivmeölçerleri farklı konumlara taşıyabilmek için herhangi bir sayıya ayarlanabilir.
Bu, verileri toplarken işaretlemelerden kaynaklı hataları ortadan kaldırmaya yardımcı olur. Simcenter Testlab’da ölçüm noktası tanımlaması, geometride karşılık gelen bir nodal nokta ile eşleşmelidir.
Düzen ayrıca, Şekil 17’de gösterildiği gibi, ivmeölçerlerin her ölçüm için ne kadar uzağa taşınması gerektiğini de azaltır.
Şekil 17: İvmeölçer düzeni, ivmeölçerleri hareket ettirme süresini en aza indirmeye yardımcı olur ve kablolama parazitini azaltmaya yardımcı olur.
Bu, kabloların birbirine karışmasını önlemeye yardımcı olur ve genel test süresini en aza indirir.
2.2 İvmeölçer Montajı: Sağ El Kuralı
Modal verileri uygun şekilde canlandırmak için, her ölçüm kanalı için yönler ( +/- X, Y, Z ) doğru girilmelidir.
Üç eksenli ivmeölçerin yapıya monte edildiği şekle bağlı olarak, sadece belirli yön kombinasyonları mümkündür. Bunun nedeni, ivmeölçerdeki üç kanalın birbirine göre sabit bir doğrultusu olmasıdır. Bu doğrultular, Şekil 18’de gösterilen “sağ el kuralı” ile tanımlanabilir.
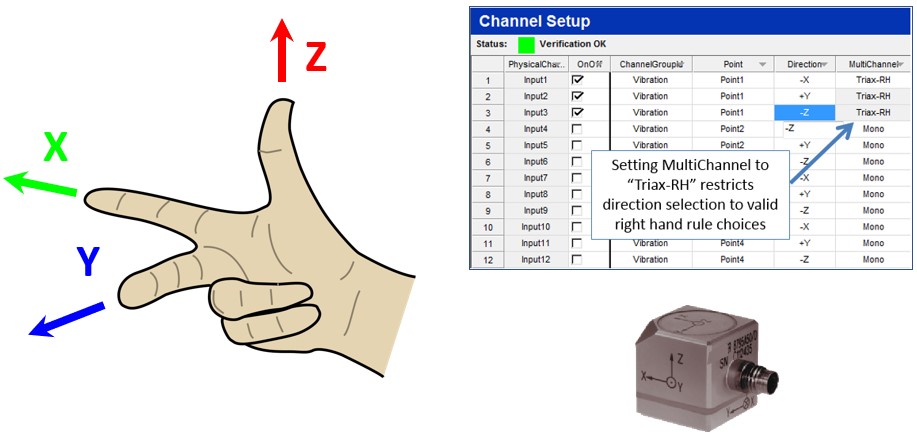
Şekil 18: Simcenter Testlab’daki “MultiChannel” alanını “Triax-RH” (sağ üst görsel) olarak seçerek, üç eksenli bir ivmeölçer (sağ alt görsel) için girilen yönler otomatik olarak sağ el kuralına (sol görsel) bağlı kalacaktır.
Üç eksenli ivmeölçerin üç kanalının (+X, +Y, +Z) yönü geometrinin +X, +Y, +Z ile tam olarak uyuşmuyorsa, değiştirilmeleri gerekir.
İvmeölçerin Z yönünün yukarı değil, aşağı baktığını varsayalım:
- +Z -> -Z olur: Sağ el kuralını kullanarak, başparmak yukarı yönü değil aşağıyı gösterir.
- +Y -> -Y olur: Orta parmak +Y’den –Y yönüne döner.
- +X aynı kalır: Bu varsayımda işaret parmağı aynı yönde kalır.
Bu durumda yönler, üç kanal için +X, -Y, -Z şeklindedir.
Üç eksenli ivmeölçerlerin X,Y,Z yönleri farklı şekillerde konumlandırılabilir fakat her durumda sağ el kuralı geçerli olacaktır.
2.3 İvmeölçerlerin Montajı: Açılar
Bir test nesnesine ivmeölçer monte ederken karşılaşılan diğer bir zorluk, montaj yüzeylerinin her zaman mükemmel bir ortogonal koordinat sistemi şeklinde olmamasıdır. Birçok ürün, Şekil 19’da gösterildiği gibi kavisli yüzeylere sahiptir.
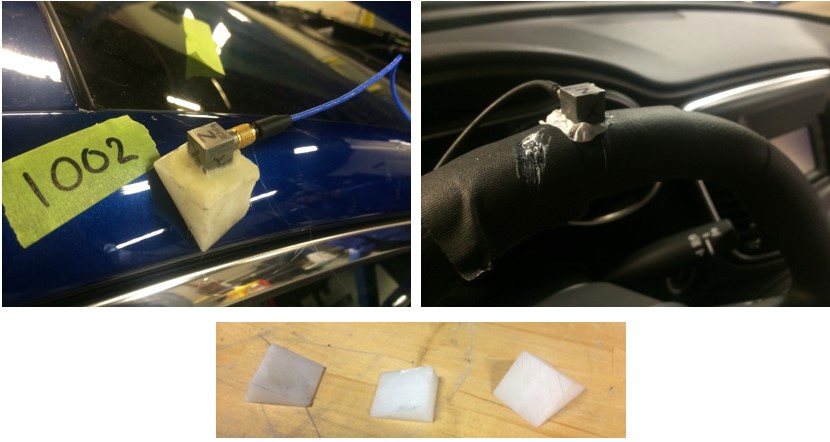
Şekil 19: Test nesneleri genellikle düzensiz şekilli yüzeylere sahiptir (üstte). İvmeölçerleri test nesnesine monte etmek için küçük takozlar (altta) kullanmak, ölçümün global koordinatlar/yönlerle hizalanmasını kolaylaştırır.
Kavisli veya düzensiz yüzeyler, ivmeölçerin test koordinat sistemiyle hizalı olarak monte edilmesini zorlaştırabilir. Tek bir test nesnesi üzerinde birden fazla farklı montaj açısı olabilir. Bu gibi durumlarda, test nesnesi ve ivmeölçer arasında kullanılabilecek çeşitli küçük açılı bloklara sahip olmak basit bir çözüm yöntemi olacaktır. Bu blokları kullanarak, ölçümlerin tümü tutarlı bir şekilde alınabilir.
Simcenter Testlab Geometry’deki diğer bir yöntem, Şekil 20’de gösterildiği gibi ivmeölçer konumlarını döndürmektir.
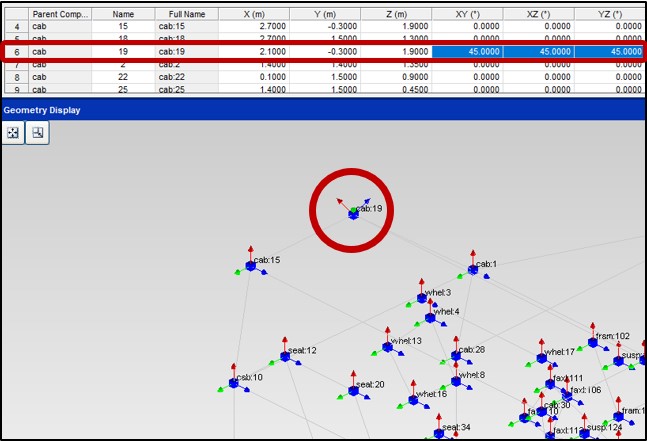
Şekil 20: Simcenter Testlab Geometri modülünde tek tek düğümler (Node) döndürülebilir. Düğüm tablosunun son üç sütunu, tek tek düğümlere uygulanabilen (kırmızı daire içine alınmış) döndürme açılarını içerir.
Test modu şekillerini bir simülasyon modeliyle karşılaştırıyorsanız, düğümleri tek tek döndürmek bazı zorluklar doğurabilir. Bir simülasyon modelindeki düğümler genellikle tek tek döndürülmez. Bir karşılaştırma yapıyorsanız, simülasyon modelinde kullanılan yönelimleri bilmek iyidir, böylece test sırasında ölçümler aynı yönelimde alınabilir.
2.4 Kalite Kontrol: FRF ve Koherans (Tutarlılık)
Ölçüm sırasında, elde edilen Frekans Yanıt Fonksiyonları (FRF’’ler) ve ilgili tutarlılık (koherans) fonksiyonları izlenmeli ve kontrol edilmelidir. Örnek ölçümler Şekil 21’de gösterilmiştir.
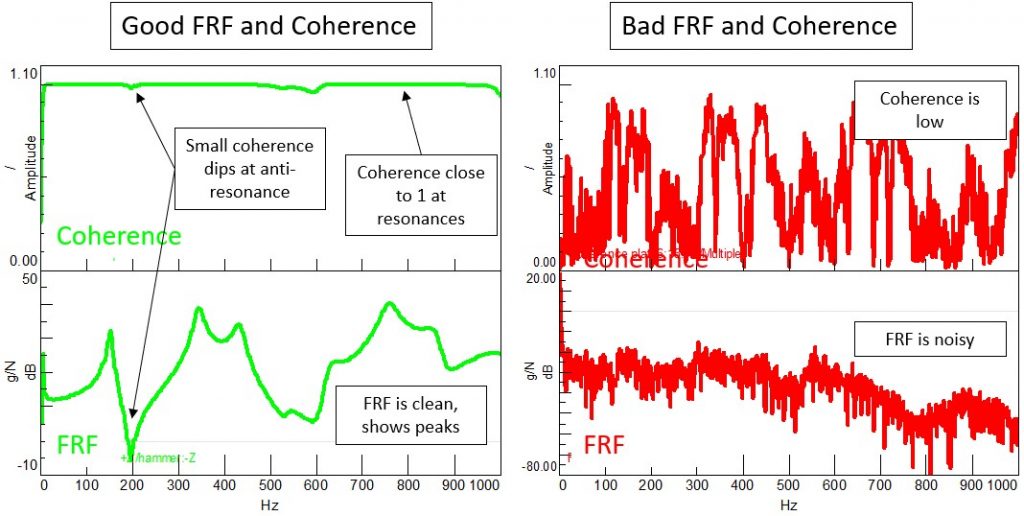
Şekil 21: Bir mod testi sırasında, her ölçüm için Frekans Tepki Fonksiyonu (FRF) kontrol edilmelidir. Sol – İyi bir FRF ölçümünün tutarlılığı (koherans) bire yakındır, Sağ – Kötü bir FRF ölçümü, gürültülüdür ve tutarlılığı düşüktür.
Şekil 21’de sağ ve sol tarafta iki ölçüm gösterilmiştir:
- Sol: Ölçümlerin tekrarlanabilirliğini gösteren tutarlılık fonksiyonu normalde görseldeki gibi 1’e yakın olmalıdır (yeşil, üst). FRF temiz, olabildiğince pürüzsüz olmalıdır (yeşil, alt).
- Sağ: Test sırasında bir sorun meydana gelirse, örneğin bir ivmeölçer kablosu bozulursa, FRF ölçümleri sağ tarafta gösterildiği gibi gürültülü olacaktır (kırmızı, alt). Tutarlılık 1’e yakın olmayacaktır, bu da almış olduğumuz ölçümde bir sorun olduğunu gösterir (kırmızı, üstte).
Test sırasında kötü bir ölçüm alınırsa, ölçüm hemen tekrarlanarak düzeltilebilir. Test işlemi tamamlanıp veri toplama işlemi gerçekleştirildikten sonra veri işleme aşamasında fark edilen hataları düzeltmek fazlasıyla zaman alacaktır.
Bir başka güzel uygulama ise test boyunca driving point ölçümünü ölçmektir. Bir sarsıcı testinde bu, sarsıcı giriş konumunda hem kuvveti hem de ivmeyi ölçen bir empedans başlığı gibi bir şeyle yapılabilir. Test birden fazla ölçüm gerektiriyorsa, driving point ölçümü mükemmel bir referanstır.
Örneğin, bir modun frekansı testin başlangıcından testin sonuna kaydırılırsa, bu, her bir ayrı ölçüm için driving point FRF aracılığıyla izlenebilir. Belki birisi ölçüm işlemi sırasında yapının üzerine yanlışlıkla bir kahve fincanı (frekansı değiştiren bir kütle) bırakmıştır. Kahve fincanından kaynaklı etkilenen ölçümler bulunabilir (umarım hiç kimse test yapısında bir kahve fincanı bırakmaz, bunu sadece örnek olarak kullandık).
3. Test Sonrası
Frekans Tepki Fonksiyonları (FRF’ler) elde edildikten sonra modal frekans, sönüm ve mod şekillerini çıkarmak için analiz edilirler. Bu işleme modal eğri uydurma denir.
3.1 Modal Eğri Uydurma
Modal eğri uydurma işleminde, Simcenter Testlab yazılımı, mümkün olan en uygun frekans, sönüm oranları ve mod şekillerine karar vermek için FRF verileri üzerinden matematiksel hesaplamalar yapar.
Modal eğri ayarlayıcıdan hangi frekansların, sönümlemelerin vb. uzak tutulacağına dair son kararı vermek analizi gerçekleştiren kişiye kalmıştır. Olası seçeneklerin bir stabilizasyon diyagramı, kullanıcıya bir karar verme kılavuzu olarak sunulur (Şekil 22).
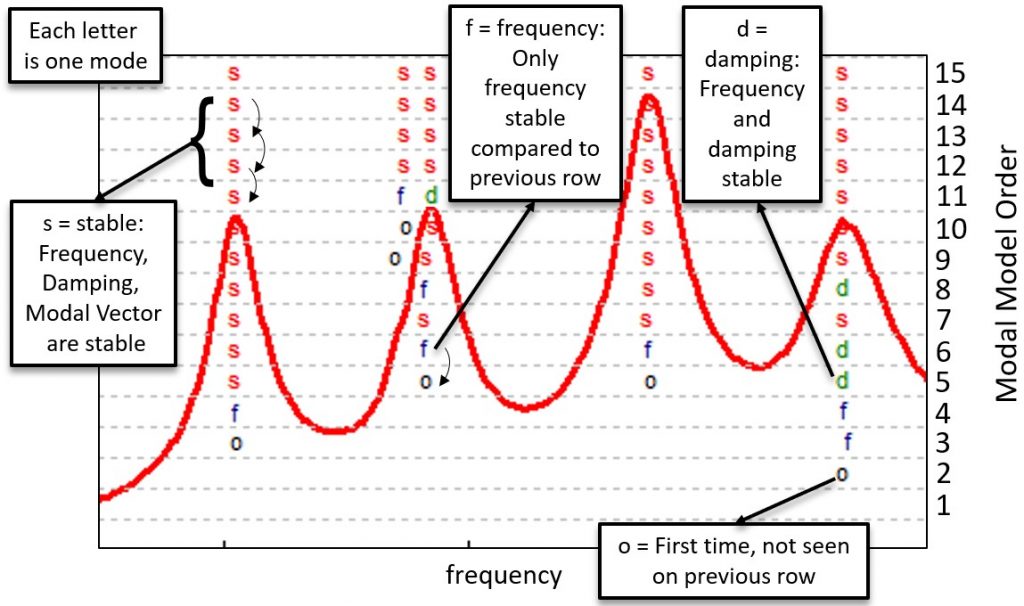
Şekil 22: Simcenter Testlab’dan örnek bir modal stabilizasyon şeması.
Simcenter Testlab üzerinde, diyagram olası titreşim modlarını temsil eden harflerle sunulur. “s” harfi, verilere kaç mod sığarsa sığdırılsın, sabit bir mod tahminini belirtir.
3.2 Modal Doğrulama: Modal Güvence Kriteri (MAC)
Modlar seçiliyken, mod seçimlerinin güvenilirliğine erişmeye yardımcı olacak doğrulama araçları vardır. Bunlardan bir tanesi modal güvence kriteridir.
Modal güvence kriteri (MAC), iki mod şeklini karşılaştırmak ve ne kadar benzer olduklarını belirlemek için kullanılır. MAC bire yakın bir değere sahipse, modlar aynı şekle sahipken, bu değerin sıfıra yakın olması ise şekillerin farklı olduğunu gösterir.
Modal Güvence Kriterinin hesaplamasının örnek bir çıktısı Şekil 23’te gösterilmektedir. Modal bir eğriden dokuz mod seti birbiriyle karşılaştırılır.
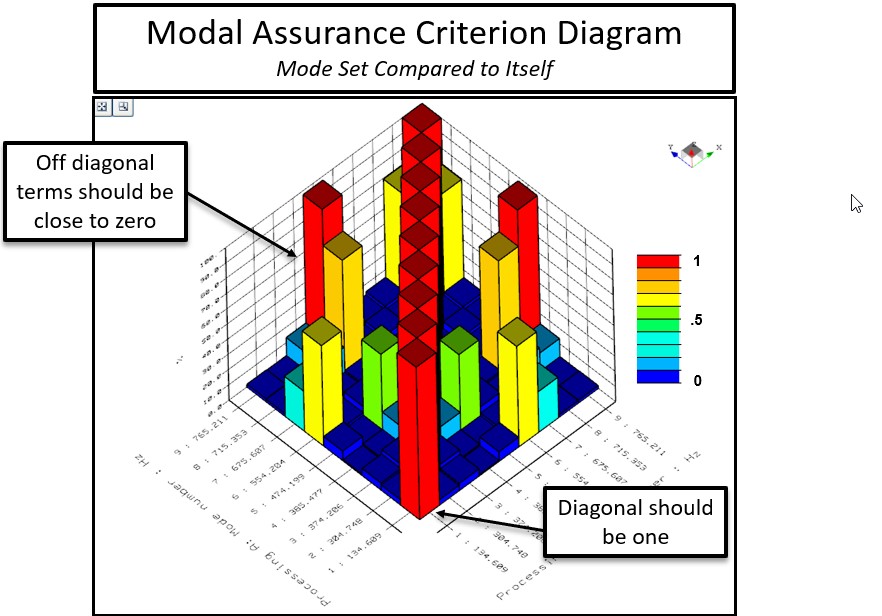
Şekil 23: Dokuz moddan oluşan bir sette Modal Güvence Kriteri (MAC). Merkezdeki kırmızı çubukların köşegenleri kendilerine göre aynı modlardır, bu nedenle 1 değeri beklenir. Farklı modların birbirine göre MAC değerleri, mod şekillerinin birbirlerinden ayrı olması beklendiği için sıfıra yakın olmalıdır.
Modal Güvence Kriteri: Seçilen her bir mod şeklinin diğerlerine kıyasla ne kadar benzersiz olduğunu gösterir. Bu yöntem bize, örneğin aynı modun yanlışlıkla iki kez seçilmesi gibi olası sorunları gösterebilir. Ayrıca, test sırasında yeterli nokta ölçülmediğini de gösterebilir, bu da gerçekte farklı olan modal frekansların aynı gibi görünmesine sebep olur.
3.3 Modal Doğrulama: Modal Sentez (Modal Synthesis)
Modal Güvence Kriteri, çok fazla modun seçilip seçilmediğini gösterebilse de, Modal Sentez, Şekil 24’te gösterildiği gibi modal eğri uydurma işlemi sırasında herhangi bir modun kaçırılıp kaçırılmadığını kontrol edebilir.
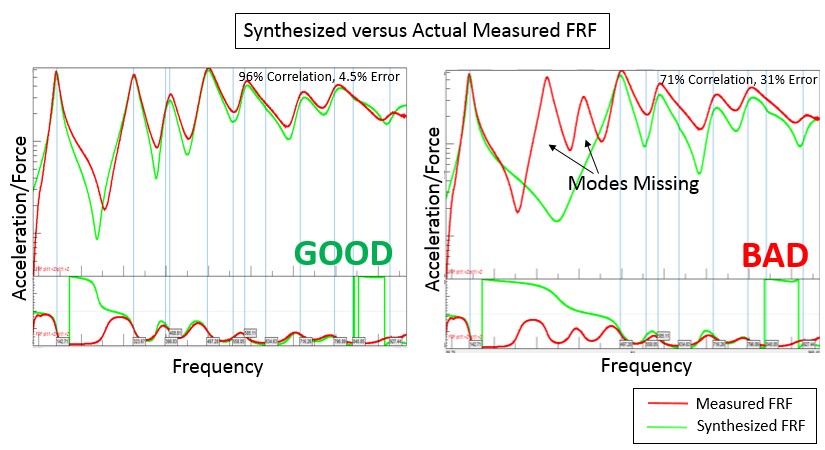
Şekil 24: Modal sentez, ölçülen FRF verilerini modal eğriden sentezlenmiş bir FRF ile karşılaştırır. Modların kaçırılmış olma olasılığının düşük olup olmadığını (solda) veya modların eksik olup olmadığını (sağda) gösterebilir.
Modal sentez, modal eğri uydurma sırasında bulunan modlardan FRF’nin üretildiği bir süreçtir. Bu sentezlenmiş FRF, iyi bir eşleşme olup olmadığını görmek için gerçekte ölçülen FRF ile karşılaştırılabilir.
Simcenter Testlab’da eşleşme sayısal olarak da gösterilir. Sentezlenen her bir FRF’ye ve buna karşılık gelen ölçülen FRF’ye atanan bir korelasyon ve bir hata yüzdesi vardır. Hata yüzdesi mümkün olduğunca sıfıra yakın olmalı, korelasyon yüzdesi ise mümkün olduğunca %100’e yakın olmalıdır.
3.4 Diğer Test Sonrası Analiz Seçenekleri:
Diğer analiz seçenekleri şunları içerir:
- MLMM – Maksimum Olabilirlik Modal Modeli, ölçülen FRF’leri takip etmek için modsal tahminlerde ince ayarlar yapabilir.
- Mod Şekli Genişletme – Test düğümlerini alın ve bir CAD veya FEA geometrisine yansıtın.
- Modifikasyon Tahmini – Yeni modları tahmin etmek için mod modellerini test etmek için sertlik, kütle ve ayarlanmış emiciler ekleyin.