

Bir sistemi belirlenen bir hedefi takip edecek şekilde kontrol etmek söz konusu olduğunda yaygın olarak kullanılan ilk fikir Oransal – Integral – Derivatif (PID) denetleyiciyi kullanmaktır. Bu genel amaçlı denetleyicinin birçok duruma uygun 3 tane parametresi vardır. Gerçek endüstriyel uygulamaların % 90’ından fazlasında başarılı bir şekilde kullanılır, bunların çoğu da türevsel etkisi olmayan PI denetleyicileridir.
Bu 3 parametreyi kalibre etmek bazen zorlu bir süreç gerektirir. Simcenter Amesim’in “PID Tuner” aracı bu noktada bize yardımcı olmaktadır. Sadece birkaç tıklama ile PID denetleyici sistem kolayca kalibre edilebilir. Bu blog yazısı PID denetleyici döngüsünü hızlı bir şekilde kalibre edebilmek için yol gösterici olacaktır.
PID denetleyicinin çalışma prensibi
PID nedir ? PID bir geri besleme kontrolörüdür: istenilen ayar noktasındaki değer (SP) ile gerçek değer (AV) karşılaştırır. Bu iki değer arasındaki farka ‘hata değeri’ denir.
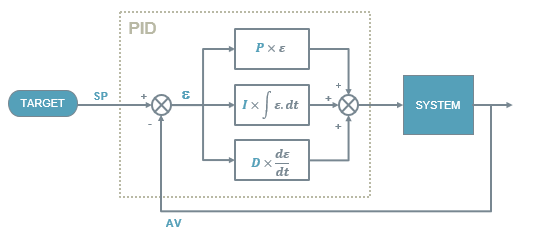
Bu hata değerlerinden PID denetleyicisi 3 etki hesaplar;
– Oransal etki, geri besleme ile elde edilen hata değerine anında ve orantılı olarak tepki verir. Hata azaldıkça referans değere yumuşak bir şekilde yaklaşmayı sağlar ancak zayıflayan kontrol etkisi referans sinyale tam olarak ulaşamamasına neden olur. Bu da statik bir hata kalmasına neden olur. Yüksek oranlı kazanç değeri tipik olarak statik hatayı azaltırken kararlılık bölgesinin sınırlarını da azaltmaktadır.
– Integral etki, sistemin çalışmaya başladığı andan itibaren birikmiş olan hata değeri ile orantılıdır. Bu eylem genellikle statik hatayı ortadan kaldırmaya yardımcı olur. Etkisi oransal eylemden daha yavaştır.
– Türevsel Etki, hatanın değişim hızına orantılı olarak tepki verir. Türev ile kontrol etkisi sisteme bir öngörü kazandırır. Sisteme sönümleme etkisi sağlayabilir. Ancak sistemdeki gürültüyü yükseltmesi pratikteki kullanımını kısıtlar.
Bu parametrelerin tekil etkiler kadar kolayca tahmin edilebilirken, çapraz etkiler daha az sezgiseldir. Ayrıca, sistemi stabil tutmak için kazanımları artırmanın da sınırları vardır. Bu nedenle, hem performans hem de kararlılık hedeflerini karşılayan iyi bir P, I ve D kazanç değerleri kümesi bulmak için bir yöntem izlemek gerekir.
‘PID Tuner’ ile kalibrasyon
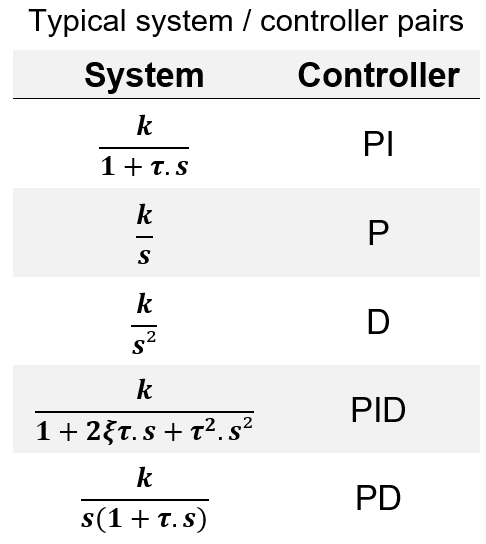
PID parametrelerini kalibre etmek için çeşitli yöntemler vardır. Bunlardan en ünlü olanları oldukça deneysel olan Ziegler-Nichols ve Cohen-Coon gibi metotlardır. Bu yöntemler belirli bir kurala göre kazanç değerlerini sistem stabil bir tepki verene kadar iteratif olarak değiştirmeye dayalıdır. Bunun gibi sistem karakteristiğine kolay ya da doğrudan erişilemeyen durumlarda kontrol parametrelerini sezgisel olarak ayarlamaya çalışmaya “kör kalibrasyon” denir. Ancak, sistemin karakteri bilindiğinde (örneğin sistem Simcenter Amesim’de tasarlandığında ) sistemin doğrudan sentezlenebilmesi çok daha caziptir. Simcenter Amesim’in PID tuner aracı Tablo 1’deki gibi tipik kontrolcü sistemleri uygulamaya imkan tanır.
PID parametrelerini belirleme prensibi aşağıdaki gibidir:
1. Sistemin imzasının elde edilmesi. Yani sistemin karakteristiğini veren transfer fonskiyonunun elde edilmesi.
2. Hedef bir transfer fonksiyonu tipi seçin. Örneğin birinci dereceden tipinde
3. Bu iki girdiyi kullanarak doğrusal cebir işlemleri ile kontrolcü otomatik olarak sentezlenebilir.
Tabiki bu prosesin sınırları vardır, sadece bir PID kontrolü tüm sistem türleri için kullanılamaz. Tablo 1’de hangi sistemlere hangi kontrolcünün en iyi cevap verdiğini görebilirsiniz. Makul kabuller ile birçok tipik örnek bu şekilde kontrol edilebilir.
Simcenter Amesim PID tüner aracı bütün bu yaklaşımları kapsar ve tüm hesaplamaları arkaplanda yapar. Şimdi bunu bir örnekle inceleyelim.
İki kütlenin farklı yay ve amortisörler ile birbirine bağlı olduğu çift kütle-yay sistemi düşünelim. Hedefimiz, dış kütleye kuvvet uygulayarak ortadaki kütlenin konumunu kontrol etmektir. PID denetleyicisine sahip sistemin modeli Şekil 2’de görüldüğü gibidir.
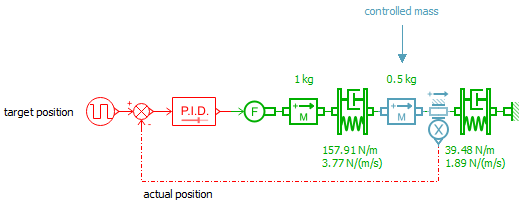
Adım 1. Sistemin Doğrusallaştırılması
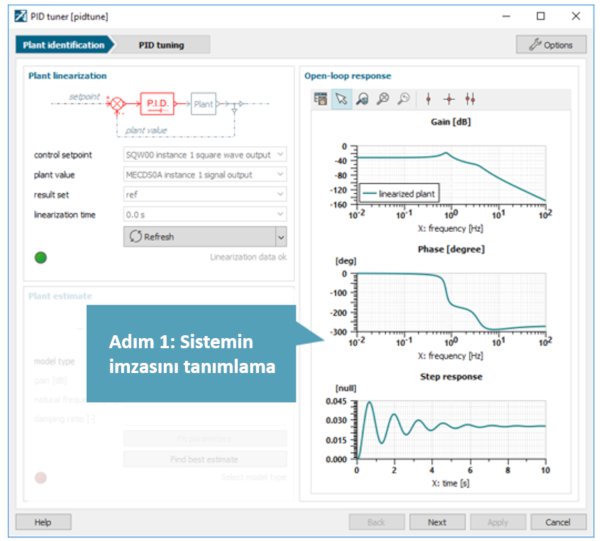
Varsayılan PID parametreleri ile ilk simülasyon gerçekleştirilir. Bu aşamada sistemin imzası dediğimiz açık döngü frekans cevabını ve basamak cevabını elde ederiz. Böylece sistemin doğrusallaştırılmış davranışını PID tuner aracına tanımlarız. Doğrusallaştırmanın bir sonucu olarak kazanç ve faz grafiklerinden 0.8 Hz ve 3.7 Hz’de sistemin doğal frekansları olduğunu gözlemleyebiliriz. Ayrıca sistemin basamak cevabından da sistemi anlamak oldukça kolaydır. Burada oldukça düşük sönümü ve düşük frekansı olan ayrıca 0.025 değerine yakın bir statik kazanç değerinde kararlı hale gelen ikinci dereceden basamak cevabını görebilirsiniz.
#İp ucu 1: PID ayarlayıcısı aracından yüksek performans elde etmek için grafiğin eksen aralığını düzenleyin. Sistemin 1. doğal frekansını Bode diagramında kabaca grafiğin ortasında konumlandırmalı ve basamak cevap grafiği simülasyon süresinin tamamını kapsamalıdır. Bu işlemleri grafik ayarlama seçenekleri ile gerçekleştirebilirsiniz.
Adım 2. Modelin tahmini

Sayısal bir veri olan sistemin imzası, kazanç değerlerinin elde edilebileceği analitik bir modele dönüştürülmelidir. PID tuner aracı bunu gerçekleştirmek için otomatik model uydurma özelliği sunmaktadır. Varsayılan olarak, kazanç eğrisi ve basamak cevap eğrisi de aynı anda uydurulur.
# İp ucu 2: Yüksek frekanslardaki değil baskın olan dinamik davranış önemlidir. PID yalnızca bir doğal frekansı karşılayabilir bu nedenle dikkatli bir seçim yapılmalıdır. Bizim çalışmamızın 0.7 Hz’deki modunun daha baskın olduğu açıktır. Bu nedenle kazanç eğrisinde yüksek frekanslı kısmı göz ardı ederek sadece basamak cevap fonksiyonunu hedef alarak daha iyi model uydurma gerçekleştirebiliriz.
Bu ayarlar ile PID tuner aracı 0,8 Hz ve % 13 sönümlemeye sahip ikinci dereceden bir modele yakınsar. Gözle görülür bir şekilde, DC kazanç ve ilk tepe için kazanç eğrisi düzgün bir şekilde uymuştur. İkinci tepe noktası ve ilgili sönüm yakalanamamıştır. Ancak, basamak cevapı %97.7 doğrudur bu yüzden basitleştirme işleminin oldukça iyi olduğunu söyleyebiliriz.
Adım 3. PID parametrelerinin ayarlanması
PID ayarlayıcının ikinci sekmesine geçerek işleme devam ederiz. PID parametrelerinin ayarlanması işlemi kaydırma çubuğunun hareketi ile basit bir şekilde gerçekleştirilir ve basamak cevabının grafiğinde önizlemesi görüntülenebilir.
Burada hedeflenen cevap frekansı 0.5 Hz olarak ayarlanmıştır. PID tuner aracı kararlılık bölgesinin uygun olduğunu renkli simgelerle gösterir (91. derece ve 12.1 dB). Mavi renkteki e.ğri, beklenen basamak cevabını; turuncu noktalı eğri ise, sistem kazanımlarının hesaplandığı 2. derecedeki model ile eşleşen teorik cevabı gösterir. Bu kazanç değerleri modele uygulandıktan ve simülasyon güncelledikten sonra, bu ayarlamanın beklenildiği gibi davrandığı doğrulanabilir.
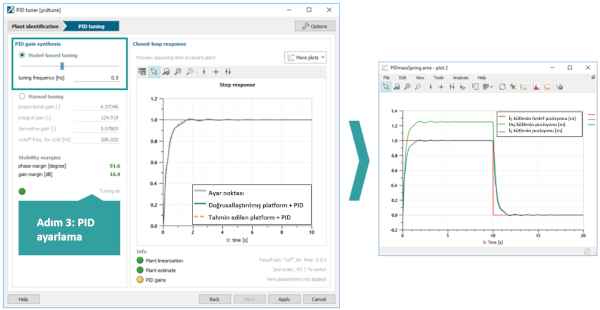
Kontrol sistemi bu şekilde kalibre edilir. Açık döngünün cevabı ile karşılaştırıldığında statik hata ortadan kalmıştır ve düşük frekanstaki salınım ciddi oranda sönümlenmiş ve tepki süresi oldukça hızlanmıştır. Kaydırma çubuğunu kabul edilebilir kararlılık sınırları dahilinde hareket ettirerek daha hızlı veya daha yavaş tepki kolayca ayarlanabilir.
Simcenter Amesim’de PID tuner aracının kullanımını aşağıdaki videodan izleyebilirsiniz.
Gelişmiş kaibrasyon
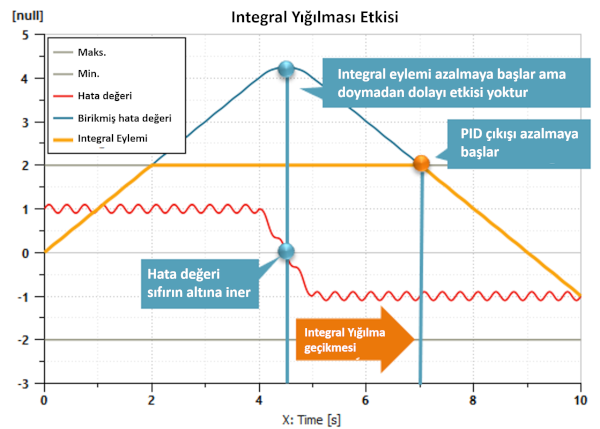
Integral yığılması ve Integral doyması
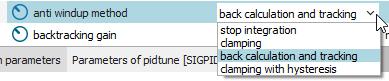
Ek olarak, PID denetleyicinin çıkışı, aktüatörün güç sınırlarıyla uyumlu olacak şekilde sınırlandırılabilir. Doygunluk düzgün bir şekilde yönetilmezse, integral etki ve doygunluğun kombinasyonu genellikle yığılma sorunlarına yol açar. Peki bu ne demektir ? Hatanın sürekli arttığını varsayalım. PID’nin çıkışı da artacak ve sonunda doygunluğun üst sınırını aşacaktır. Bu birikimin, hata tekrar azalmaya başlayana kadar bir etkisi yoktur. Ayrıca, integratör çıkışı da azalmaya başlayacaktır, ancak gerçek değer üst sınırın üzerinde olduğundan, bu eşiğin altına ininceye kadar PID çıkışına yansımayacaktır. Bu duruma integral yığılması etkisi denilmektedir.
Bu görünmez tehlikeden kaçınmak ve integral eylemi çıkış doygunluğu ile senkronize etmek için PID ayarlayıcının alt modelinde birkaç anti-windup tekniği mevcuttur.
İnce ayar işlemi
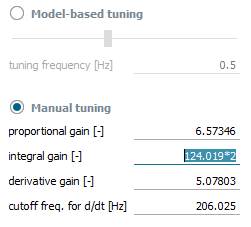
Manuel düzenleme modu ile basamak cevabının önizlemesi
PID kazanç değerlerine kolay bir şekilde ince ayar yapılabilir. Sadece “Manuel ayarlama” düğmesine basılıp, önerilen kazanç değerleri değiştirilebilir.
Cevabın önizlemesi her değişiklik sonrasında anında güncellenir.
Kararlılık Bölgesi
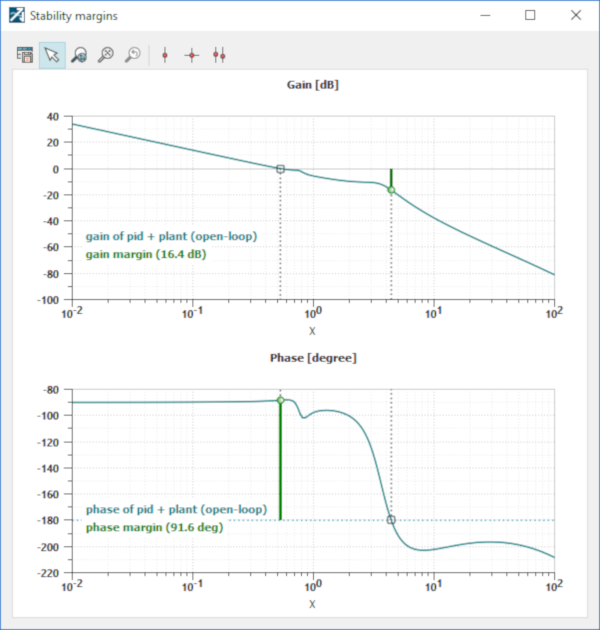
Kararlılık bölgeleri PID ayarlayıcı aracının arayüzünde renkli simgeler ile görüntülenir.
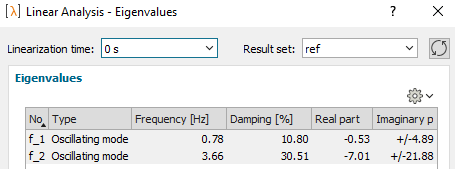
Ayrıca herbir özdeğer (doğal frekans) için doğrusal analiz sonuçlarından daha detaylı grafiklere ulaşabilirsiniz.
PID döngülerinin ard arda kullanılması
Hareket kontrolü için, klasik bir yaklaşım, hız ve konum döngülerinin ard arda kullanılmasıdır. Bu şemanın iç döngü sayesinde daha hızlı pertürbasyon telafisi, hız ve konum tepkisinin bağımsız kalibrasyonu gibi birkaç faydası vardır.
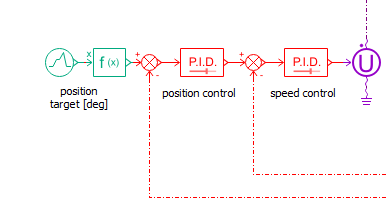
“PID ayarlayıcı aracı bu yaklaşıma tamamen uyumludur ve aynı süreç geçerlidir: öncelikle, iç döngünün parametreleri ayarlanır ardından iç döngünün doğrusallaştırma seçeneğini ‘normal’ e getirdikten sonra dış döngünün parametreleri ayarlanır.
Sonuç olarak,
Simcenter Amesim yazılımının PID tuner aracı herhangi kontrol bilgisi olmadan sadece birkaç tıklama ile PID döngüsünü kolayca kalibre etme imkanı sunmaktadır. İster kararlılık bölgeleri ile ilgilenen bir kontrol uzmanı olun, isterse sadece sistemi hızlı bir şekilde çalışmasını isteyen bir sistem tasarımcısı olun, bu araç sayesinde kontrol yeteneklerini ve mekatronik sistemlerin simülasyonunda verimliliğinizi arttıracaksınız.
PID tuner aracının Simcenter Amesim yazılımında nasıl kullanıldığını adım adım gösteren videoya aşağıdan ulaşabilirsiniz.
Ayrıca, kontrol stratejilerin doğrulanmasına sistem simulasyonunun nasıl yardımcı olduğu hakkında daha fazla bilgi edinmek için Siemens tarafından düzenlenmiş olan web seminerine kayıt olup izleyebilemek için tıklayınız.
Herhangi bir sorunuz ya da talebiniz olduğunda bize firma iletişim bilgilerimiz üzerinden ya da info@dta.com.tr mail adresinden ulaşabilirsiniz.